- 深圳龙铁高科技术有限公司
- 13826575588

产品描述
技术优势:
厘米级定位精度:RTK有效时,导航测量仪所输出的定位数据达到厘米级精度;
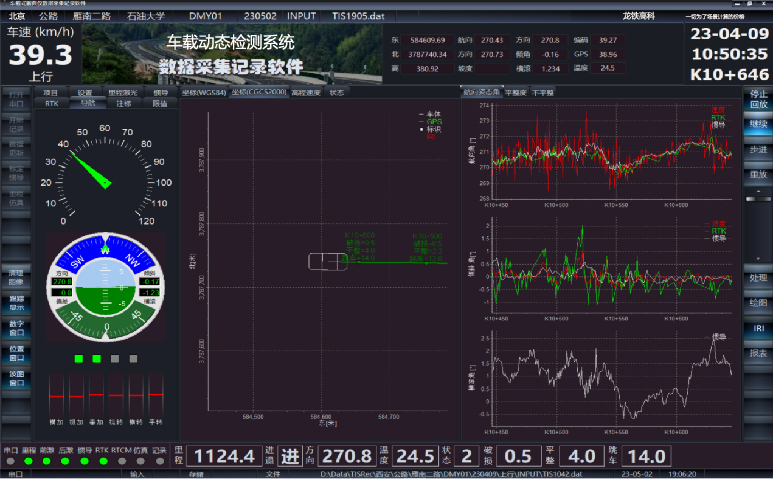
可用性高:RTK无效时,自主研发的独特组合导航算法,有效提高导航定位精度,保证数据输出持续性和稳定性,可用性接近100%;数据实时生成路径高精地图:使用龙铁专用软件可对导航数据进行实时处理解算,绘制出对应行驶过的线路的高精路径地图,可替代高精地图用于无人驾驶。
对比INS570D:
INS570D | 深圳龙铁 | |
技术路线 | IMU+GNSS+速度传感器+环境感知+高精地图 | IMU+GNSS(RTK)+里程计+摄像头+网络地图+高精路径地图 |
算法优势 | *早研究IMU+RTK组合导航算法, 相对于其它企业拥有算法优势 | 高维几何测量理论、 高维卫惯组合算法、 形状测量法、形状检测法 |
产品功能 | 位置、速度、航向、姿态数据输出 | 位置、速度、航向、姿态数据输出, 铁路线形测量、轨面质量检测、 高精路径地图绘制 |
应用场景 | 自动驾驶 | 黑盒子+仪表驾驶+自动驾驶+轨道交通大数据平台 |
市场优势 | 已大规模量产,产品性价比较高 | 已量产,预计性价比更优 |
项目 | INS570D | LR高精导航仪3DH330 | LR高精导航仪2DH110 | |
系 统 | ||||
横滚/俯仰(1σ) | ≤0.1° | ≤0.1° | ≤0.1° | |
GNSS失锁 精度 | 位置漂移 | ≤2‰ | ≤1‰ | ≤ 4‰ |
航向漂移 | ≤9°/h | ≤5°/h | ≤ 10°/h | |
陀 螺 | ||||
量程 | ±250 °/s | ±450 °/s | ±2000 °/s | |
标度误差 | ≤ 1.5 ‰ | ≤ 0.15 ‰ | - | |
零偏稳定性 | ≤ 10°/h | ≤ 5°/h | ±0.5 – 1°/s | |
零偏不稳定性(1σ) | ≤ 4° /h | ≤ 2.5° /h | - | |
全温零偏 | ≤ 0.07 °/s | ≤0.01 °/s | ±0.005 – 0.015°/s/°C | |
加速度计 | ||||
量程 | ±4g | ±30g | ±16g | |
标度误差 | ≤ 3 ‰ | ≤ 0.5 ‰ | - | |
零偏稳定性 | ≤ 0.1mg | ≤ 0.1mg | ≤ 20mg | |
零偏不稳定性 | ≤ 2mg | ≤0.06mg | ≤ 0.15mg/C° | |
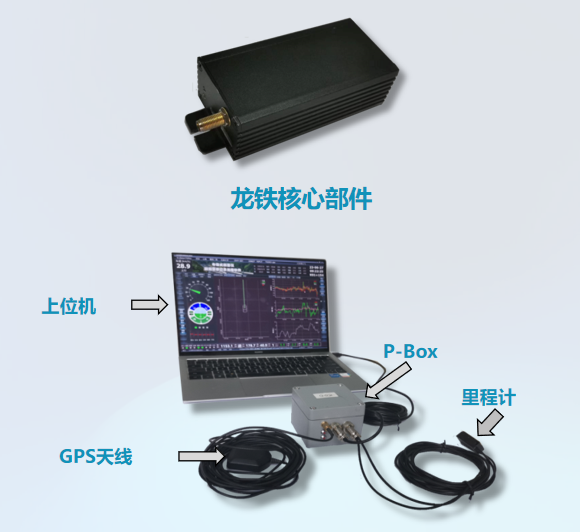
产品推荐









