- 深圳龙铁高科技术有限公司
- 13826575588



产品描述
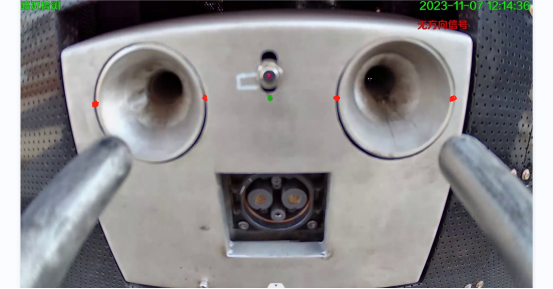
1. 算法介入阶段机械臂与充电口只做横移动作;
2. 机械臂运动方向只包括x方向即左右移动,如果需要Y方向移动识别,算法可作拓展。
3. 下图中红框位置处于整个充电口装置的(X方向);且安装在机械臂上的相机也处于机械臂的位置(X方向)。此处的逻辑为:相机与红框对齐时即代表机械臂充电与充电口对齐。
4. 下图左上角框中内容为机械臂距的距离,即机械臂仍需运动的距离(该距离分正负,正数代表需向左运动,负数代表需向右运动)。初始状态时允许有一定距离,可通过设置常量无视。
产品推荐









